Machine Learning Note - Convex Optimization
11 November 2019
Introduction
I’ve been taking an online Machine Learning class recently. This post is my note on convex optimization part.
Contents
Optimization
1. Overview
- AI problem = Model + Optimization (Similar to Program = Data Structure + Algorithm)
- Models: DL, LR, SVM, XGBoost, NN, RL
- Optimization: GD/SGD, Adagrad/Adam, Newton’s, L-BFGS, Coordinate Descent, EM.
2. Standard Form
Any optimization problem can be represented as the following standard form:
\[\begin{align} Minimize \ \ \ & f_0(x) \\ s.t. \ \ &f_i(x)\le 0, \ \ i={1,...,K}\\ & g_j(x)=0, \ \ j={1,...,L} \\ \end{align}\]Examples:
- Linear Regression:
- Logistic Regression:
- Support Vector Machine:
- Collaborative Filtering:
- K-Means
3. Categories
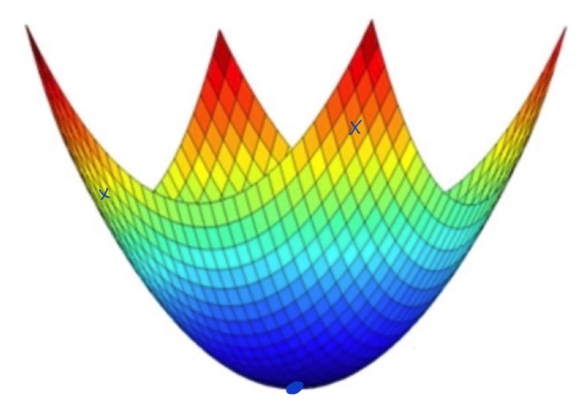
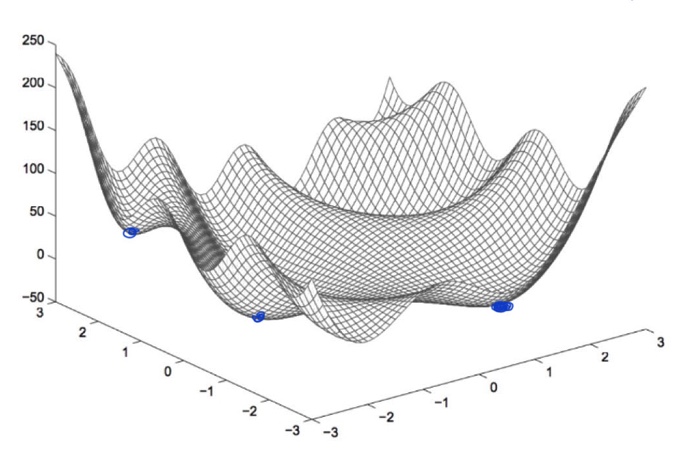
- Convex vs Non-Convex
- Continuous vs Discrete
- Constrained vs Unconstrained
- Smooth vs Non-smooth
Solving a non-convex optimization problem:
- For some simple function, we can use brute-force search to validate all feasible solutions.
- Relax some constrains and convert the problem to a convex function.
- Directly solving the problem using a optimization algorithm, try to find a better local optimal.
Convex Optimization
1. Convex Set:
$\forall x,y \in C, \forall a \in [0, 1].$ $C$ is a convex set if $ax+(1-a)y\in C$ .
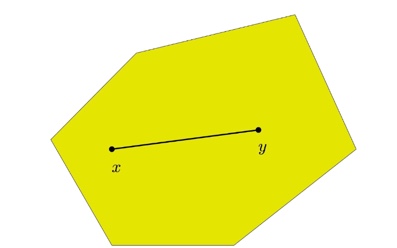
Convex Set VS Non-Convex Set:
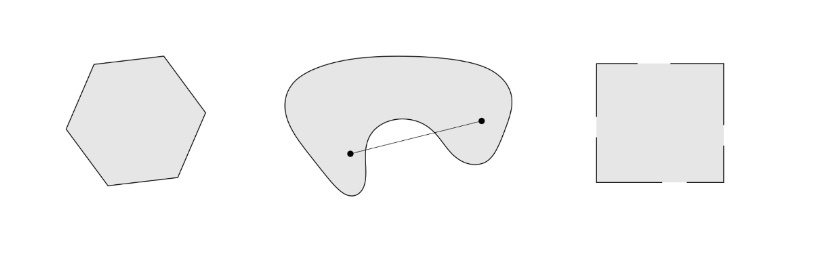
Examples of Convex Set:
- $R^n$
- Positive Integers $R^n_+$
- Norm $|x| \le 1$
- Affine set: All solution of a linear equation set $Ax = b$.
- Halfspace: All solution of a inequality $Ax \le b$.
Theroem: Intersection of convex sets is convex.
2. Convex Function
2.1 Definition
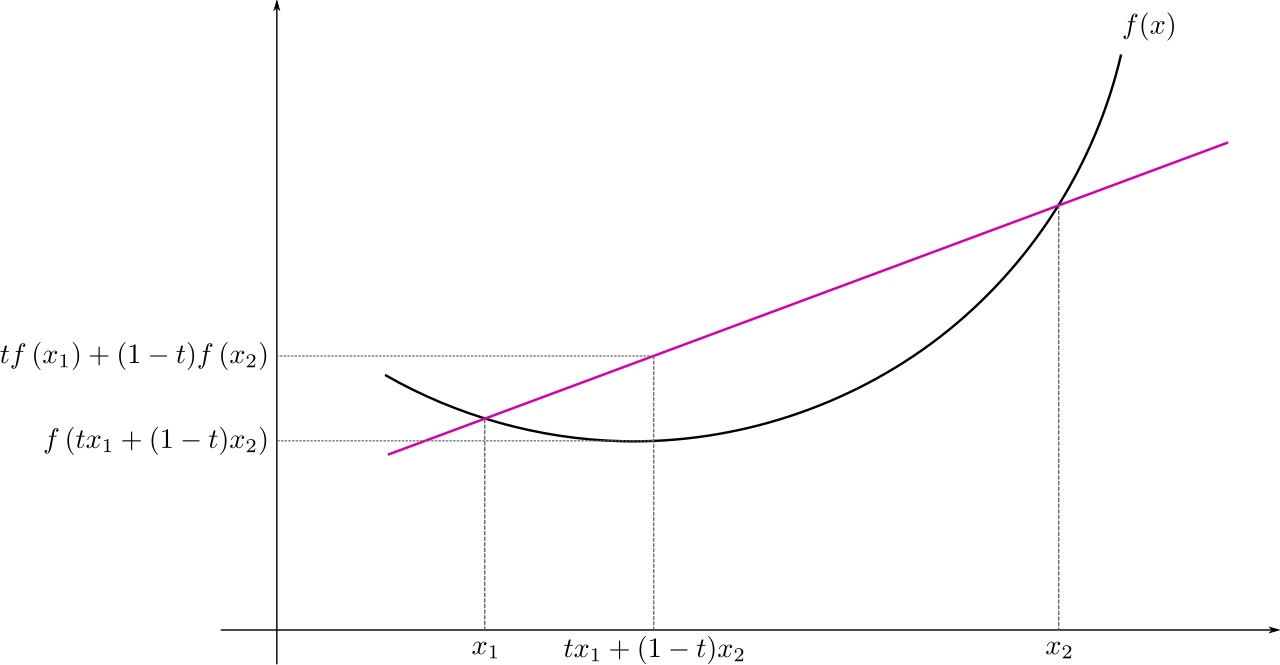
Definition. Let $X$ be a convex set in a real vector space and let $f:X\to R$ be a function.
- $f$ is called convex if: \(\forall x_1, x_2 \in X, \forall t \in [0, 1]: f(tx_1+(1-t)x_2\le tf(x_1)+(1-t)f(x_2)\)
- $f$ is called strickly convex if: \(\forall x_1\neq x_2 \in X, \forall t \in [0, 1]: f(tx_1+(1-t)x_2\le tf(x_1)+(1-t)f(x_2)\)
Property: Summation of convex functions is convex function.
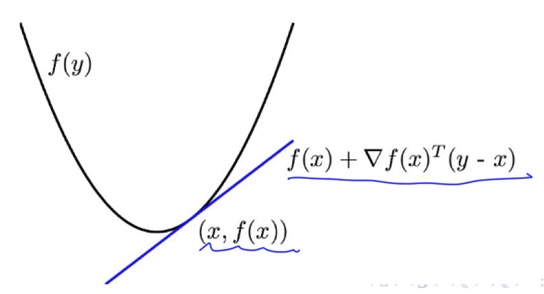
2.2 First Order Convexity Condition
Theorem. Suppose $f: R^n \to R$ is differentiable. Then, $f$ is convex $\iff f(y)\ge f(x)+\nabla(x)^T(y-x), \forall x, y \in dom(f).$
2.3 Second Order Convexity Condtion
Theorem. Suppose $f: R^n \to R$ is twice differentiable. Then $f$ is convex $\iff \nabla^2f(x)\succeq0, \forall x \in dom(f).$
Note that we use $\succeq$ (succeeds or equals) here instead of $\ge$ (greater than or equals). $A\succeq0$ means that $A$ is a positive semi-definite (PSD) matrix. (i.e.; all of the eigenvalues of $A$ are positive.
3. Proof of Convexity
Example 1. Prove that Linear Function: $f(x)=b^Tx + c$ is convex.
Proof: By definition, $\forall x_1, x_2 \in dom(f)$, we have:
\[\begin{align} b^T(tx_1+(1-t)x_2)+c &\le t(b^Tx_1+c) + (1-t)(b^Tx_2 + c)\\ tb^Tx_1+(1-t)b^Tx_2+c &\le tb^Tx_1+tc + (1-t)b^Tx_2 + (1-t)c\\ c &\le tc + (1-t)c\\ c &\le c \end{align}\]The inequality holds, hence the linear function $f(x)=bTx+c$ is convex.
Example 2. Prove that qualdratic function: $f(x)=\frac{1}{2}x^TAx + b^Tx + c, \forall A\succeq 0 \ $ is convex.
Proof: We will use second order convexity condition.
Let $\nabla$ be the partial derivative operator $\frac{\partial}{\partial x}$
\[\frac{\partial f}{\partial x} = \nabla f = Ax + b \\ \frac{\partial^2 f}{\partial^2 x} = \nabla^2f = A\]Since $A\succeq 0$, $\nabla^2f$ is a positive semi-definite matrix. Thus, the qualdratic function is convex.
Example 3. Prove that p-norm is convex. \(\|x\|_p=(\sum_{i=1}^{n}\|x_i\|^p)^{1/p}\).
Proof: Let \(f(x)=\|x\|_p\), using Minkowski inequality (triangle inequality), we have:
\[\|\lambda x_1+(1-\lambda)x_2\|_p \le \|\lambda x_1\|_p + \|(1-\lambda) x_2\|_p = \lambda\| x_1\|_p + (1-\lambda)\| x_2\|_p\]So by definition, p-norm is convex.
Example 4. Prove that logistic regression loss is convex. \(L(w)=-\sum_{n=1}^{N}(y_nlog(p_n) + (1-y_n)log(1-p_n)\)
where: \(p_n = \frac{1}{1+e^{-W^Tx_n}}\)
Proof: We will the second order convexity condition to prove this.
Let $\nabla$ denotes partial derivative operator $\frac{\partial}{\partial w}$
\[\begin{align} \nabla p&=\nabla \frac{1}{(1+e^{-{W^Tx}})} \\ &=-\frac{1}{(1+e^{-{W^Tx}})^2} \nabla(1+e^{-{W^Tx}}) \\ &=-\frac{1}{(1+e^{-{W^Tx}})^2} e^{-{W^Tx}} \nabla(-w^Tx) \\ &=-\frac{1}{(1+e^{-{W^Tx}})^2} e^{-{W^Tx}}\cdot(-x) \\ &=\frac{e^{-{W^Tx}}}{(1+e^{-{W^Tx}})^2} \cdot x \\ &=\frac{1}{(1+e^{-{W^Tx}})}\frac{e^{-{W^Tx}}}{(1+e^{-{W^Tx}})} \cdot x \\ &=\frac{1}{(1+e^{-{W^Tx}})}\frac{1+e^{-{W^Tx}}-1}{(1+e^{-{W^Tx}})} \cdot x \\ &=\frac{1}{(1+e^{-{W^Tx}})}(1-\frac{1}{(1+e^{-{W^Tx}})}) \cdot x \\ &=p(1-p)x \end{align}\]Now we can calculate the first order derivative:
\[\begin{align} \frac{\partial L(w)}{\partial w} &=\nabla{L(w)} \\ &=-\sum_{n=1}^{N}(y_n\nabla log(p_n) + (1-y_n)\nabla log(1-p_n)) \\ &=-\sum_{n=1}^{N}(y_n \frac{1}{p_n}\nabla p_n + (1-y_n)\frac{1}{1-p_n}\nabla (1-p)) \\ &=-\sum_{n=1}^{N}(y_n \frac{p_n(1-p_n)}{p_n}x_n + (1-y_n)\frac{-p_n(1-p_n)}{(1-p_n)}x_n) \\ &=-\sum_{n=1}^{N}(y_n(1-p_n)x_n - (1-y_n)p_nx_n) \\ &=-\sum_{n=1}^{N}(y_n - y_np_n - p_n + y_np)x_n \\ &=-\sum_{n=1}^{N}(y_n-p_n)x_n \\ &=\sum_{n=1}^{N}(p_n-y_n)x_n \end{align}\]Now we calculate the second order derivative:
\[\begin{align} \frac{\partial^2 L(w)}{\partial^2 w} &=\sum_{n=1}^{N}\nabla((p_n-y_n)x_n) \\ &=\sum_{n=1}^{N}\nabla(p_nx_n) \\ &=\sum_{n=1}^{N}(p_n(1-p_n)x_n{x_n}^T) \end{align}\]Then, we need to prove that matrix $p_n(1-p_n)x_n{x_n}^T$ is PSD:
\[\begin{align} \forall v\in \mathcal{R} v^THv &= v^Tp_n(1-p_n)x_n{x_n}^Tv \\ &= p_n(1-p_n)(x_n^Tv)^2 \\ \end{align}\]Since $p_n$ is a sigmoid function, we have $p_n(1-p_n) \geq 0$, which leads to $v^THv \geq 0$.
Thus, H is PSD and we proved that the logistic regression loss is a convex function.
Note: To prove a matrix $H$ is PSD, we need to prove that $\forall v\in R, v\neq0, v^THv \ge0.$